本书是一部讲解如何用大模型驱动具身智能的QW指南,系统揭示了从底层架构到实战部署的完整技术路径。作者团队融合多年一线研发经验,深入讲解如何在多模态环境中,实现智能机器人的任务理解、动作控制、记忆建构与仿真协同。本书不仅提供扎实的理论基础,更通过丰富的行业案例与系统性的方法论,帮助读者构建面向未来的具身智能系统。通过阅读本书,你将获得:(1)QM理解大模型如何赋能具身智能。揭示大型语言模型在感知-决策-执行链条中的核心作用,理清从感知到行为的智能演化路径。(2)掌握任务规划与动作控制核心技术。深度解析任务分解、动作生成、空间约束与控制策略,覆盖从高层意图到低层执行的全链路建模方法。(3)构建具身智能的记忆与反思机制。学习如何实现任务记忆、动态规划与自我优化机制,机器人在复杂环境中的自适应能力。(4)搭建可复用的开发与仿真框架。熟练运用 ROS、MoveIt、Gazebo 等核心中间件与仿真平台,助力系统开发与迭代。
大模型赋能,重新定义智能机器人的未来。
本书是一部讲解如何用大模型驱动具身智能的QW指南,系统揭示了从底层架构到实战部署的完整技术路径。作者团队融合多年一线研发经验,深入讲解如何在多模态环境中,实现智能机器人的任务理解、动作控制、记忆建构与仿真协同。本书不仅提供扎实的理论基础,更通过丰富的行业案例与系统性的方法论,帮助读者构建面向未来的具身智能系统。
目录:
第1章 大模型与具身智能
1.1 具身智能的概念
1.2 传统的决策算法
1.3 世界模型
1.4 通往世界模型的渐进之路
第2章 机器人系统架构
2.1 机器人控制基础
2.2 机器人系统设计范式
2.3 运动控制层级
第3章 基于大模型的混合控制架构
3.1 大模型与任务级规划
3.2 大模型与动作级规划
3.3 基元级与伺服级
3.4 具身智能分级混合架构
第4章 具身任务级规划
4.1 任务分解
4.2 任务级分层与端到端架构
4.3 任务级规划微调与外部记忆
第5章 分层动作级规划
5.1 动作原语及其局限性
5.2 基于技能的单步动作级规划
5.3 基于动作原语的直接动作级规划
5.4 基于价值图的动作级分层规划
5.5 基于空间位置约束的动作级分层规划
第6章 端到端动作级规划
6.1 统一模型与多任务模型
6.2 视觉语言动作模型
6.3 多任务端到端
第7章 具身智能记忆
7.1 人类记忆
7.2 大模型的记忆机制
7.3 具身智能系统中的记忆机制实现
7.4 记忆在具身智能系统中的作用
第8章 决策优化
8.1 多计划选择
8.2 反思与提炼
8.3 外部规划器
第9章 中间件与基础库
9.1 ROS机器人中间件框架
9.2 MoveIt 2逆向运动库
9.3 人形具身逆向运动库
第10章 仿真框架
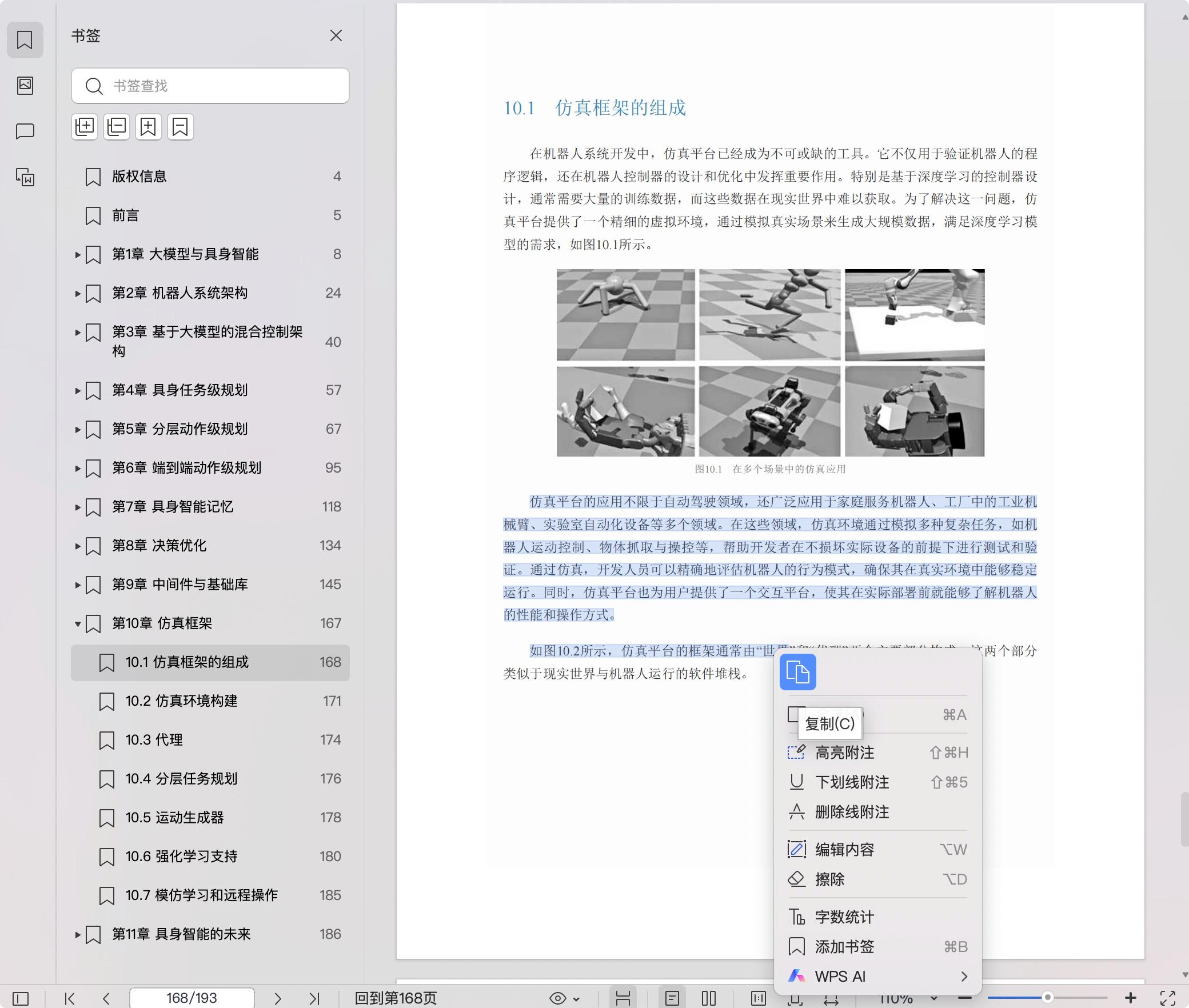
10.1 仿真框架的组成
10.2 仿真环境构建
10.3 代理
10.4 分层任务规划
10.5 运动生成器
10.6 强化学习支持
10.7 模仿学习和远程操作
11 第11章 具身智能的未来
11.1 具身智能机器人:短暂泡沫还是未来趋势
11.2 行业渗透预测
点击下载